现在关于matlab仿真的想法是分几个部分写程序:
目标路径部分、对象建模部分、控制器部分以及参杂在其中的绘图部分。
其中目标路径可以有不同的形式,点、直线、圆、S曲线等;
对象建模从简单的开始,从经典的二轮小车模型开始,在分别对舵机、电机建模,最后统一起来整体建模;
控制器先采用PID算法,再考虑模糊算法。
小车对象为一个多输入多输出的系统。
下午成果:
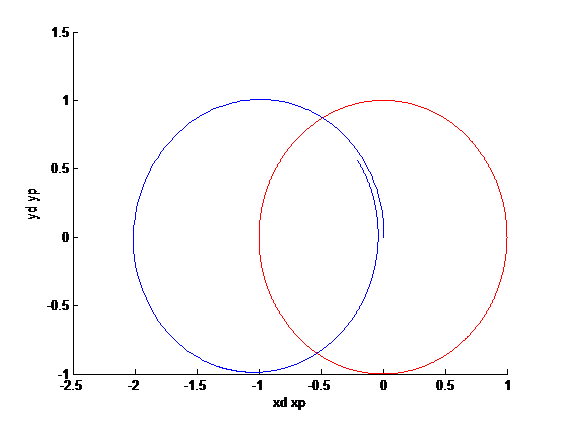
采用了P控制,对二轮小车的经典模型进行了控制仿真。
当去掉P时,小车路径仅为一点;若P作用越强,小车路径与目标路径偏差越大。去掉偏差,必须加入I作用。
程序如下:
clear all
close all
clc
ts=0.001;
for k=1:1:2000
xd(k)=cos((k-1)*pi*ts);
yd(k)=sin((k-1)*pi*ts);
thd(k)=ts*pi*(k-1)+pi/2;
end
u1(1)=0;u2(1)=0;
e1tmp=0;e2tmp=0;e3tmp=0;
y0=[0;0;pi/2];
for k=1:1:2000
if k==1
q=y0;
end
xp(k)=q(1);
yp(k)=q(2);
thp(k)=q(3);
%current error of time k
qd=[xd(k);yd(k);thd(k)];
ce1(k)=qd(1)-q(1);
ce2(k)=qd(2)-q(2);
ce3(k)=qd(3)-q(3);
E=[ce1(k);ce2(k);ce3(k)];
B=ts*[cos(q(3)) 0
sin(q(3)) 0
0 1];
Kp=[100 100 100
100 100 100];
Kd=[0 0 0
0 0 0];
Ki=[10 10 10
10 10 10];
if k==1
Etmp=[e1tmp;e2tmp;e3tmp];
Ei=0;
end
Ep=E;Ed=(E-Etmp)/ts;Ei=Ei+E*ts;
U=Kp*Ep+Kd*Ed+Ki*Ei;
u1(k)=U(1);u2(k)=U(2);
u=[u1(k);u2(k)];
q=q+B*u;
%error of previous time k+1
e1(k)=cos(k*ts*pi)-q(1);
e2(k)=sin(k*ts*pi)-q(2);
e3(k)=ts*k*pi+pi/2-q(3);
Etmp=E;
end
figure(1);
hold on;
plot(xd,yd,'r',xp,yp,'b');
xlabel('xd xp');ylabel('yd yp');
figure(2)
hold on;
plot(xp,yp,'b');
xlabel('xp');ylabel('yp');